2017
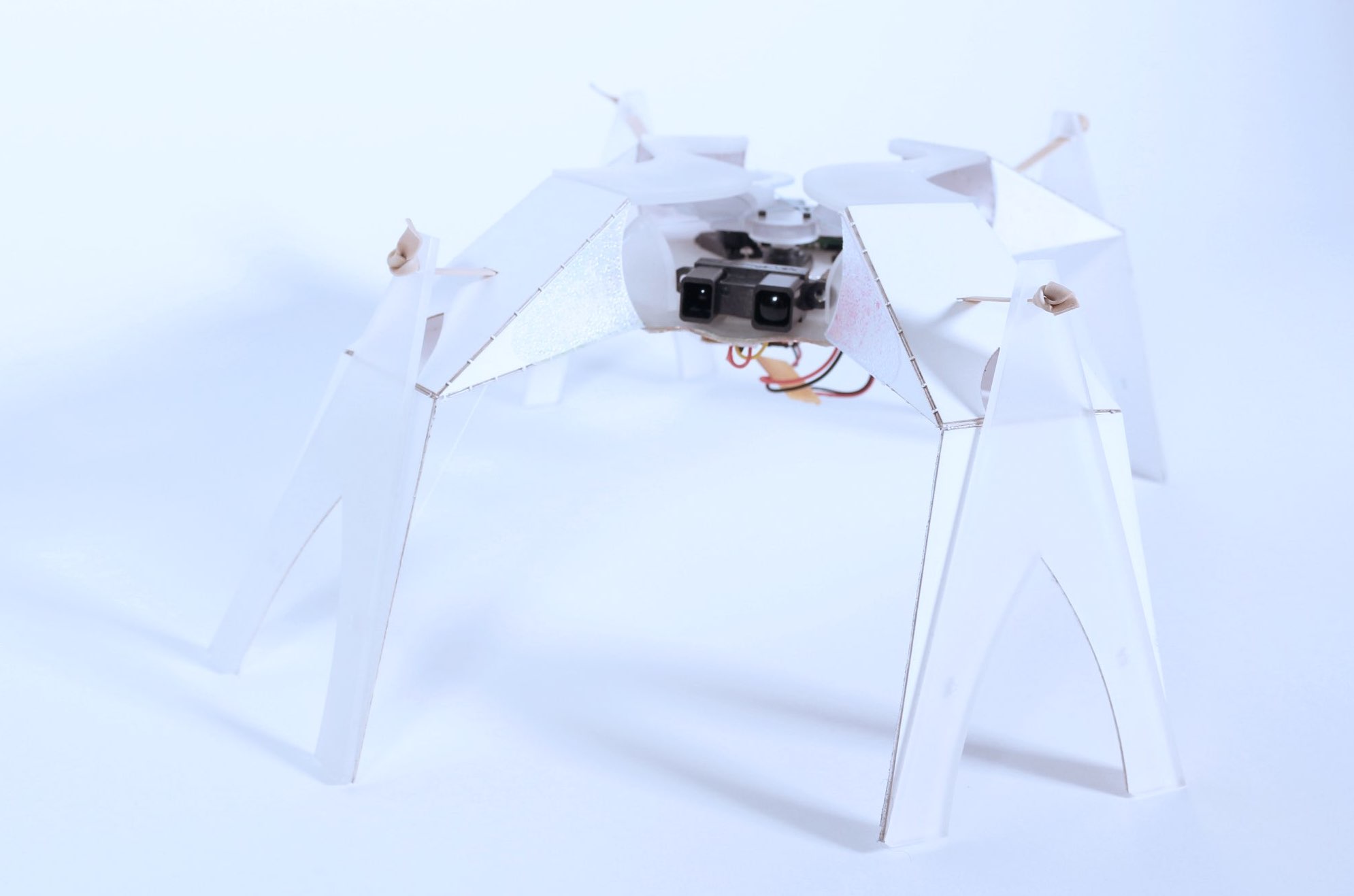
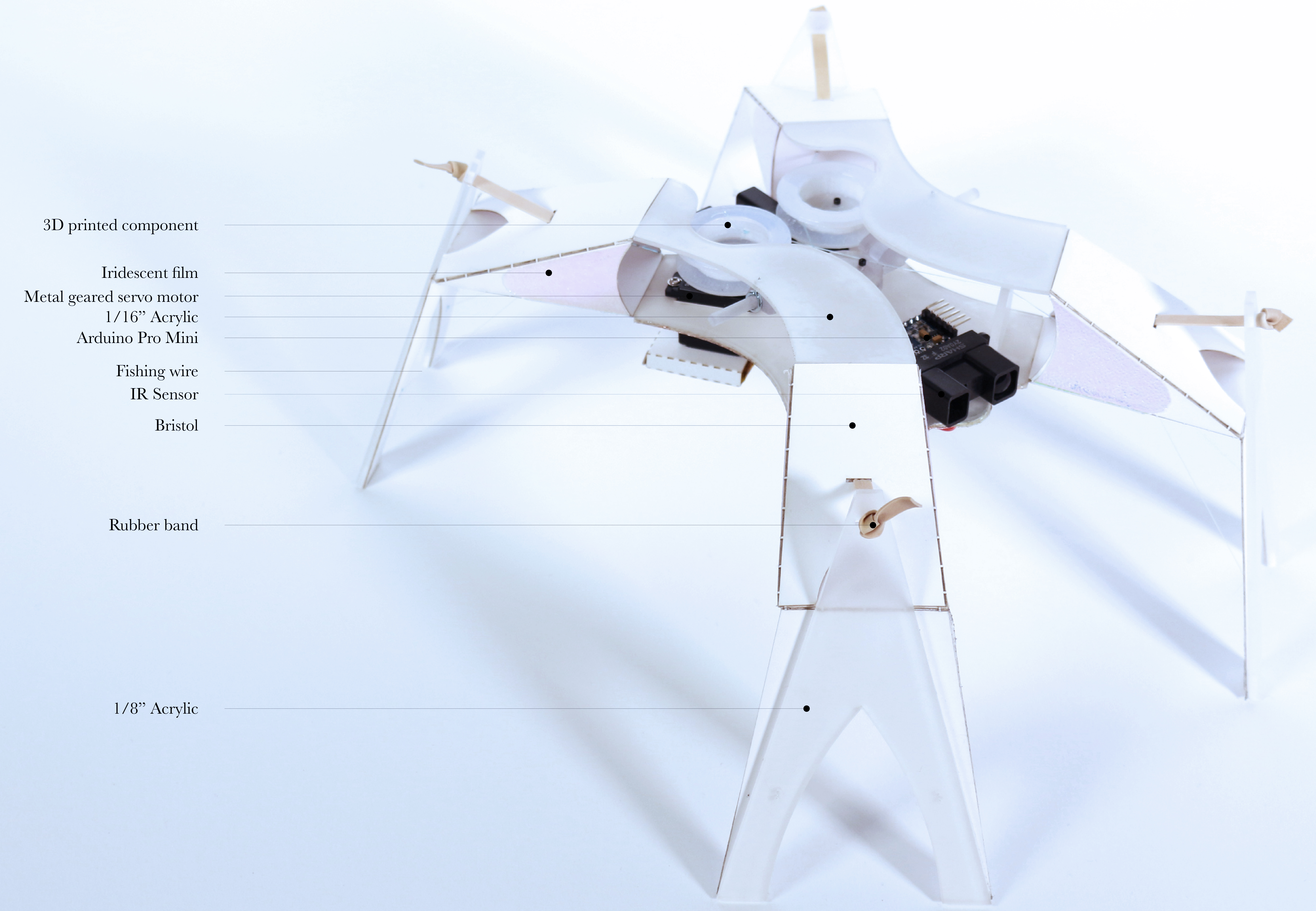
Lula is an ambulating robot with four legs. Movement in her 'hips' and 'knees' is created in parallel bar hinges and single folds. Inspired by the legs and gait of insects, Lula's body consists of joined limbs that perform opposite movements. The joined limbs simplify the design while maintaining a steady gait. Lula's originality lies the use of unconventional materials contributing to her movement: wires and elastic bands act as 'muscles' transferring the kinetic energy from the motors further into the body. She senses her distance to objects on her path and adjusts her speed and direction accordingly.

Team: Olga Geletina and Lara Tomholt
Instructors: Chuck Hoberman and Jonathan Grinham